This article refers to my BA thesis in Humanoid Robotics studies. You can download my in-depth work below the article.
There are over 34.000 species of fish [1] with very diverse solutions to cope with the challenges of their environments. For millions of years the bodies of fishes have been optimized for effective propulsion through evolutionary diversification [2]. The control surfaces they use to swim, fins, don't contain muscles, yet fish can change their shape with precision and speed [3]. It is due to their very own characteristic structure that fins are able to perform large morphing amplitudes - entirely passive, meaning without internal energy sources.
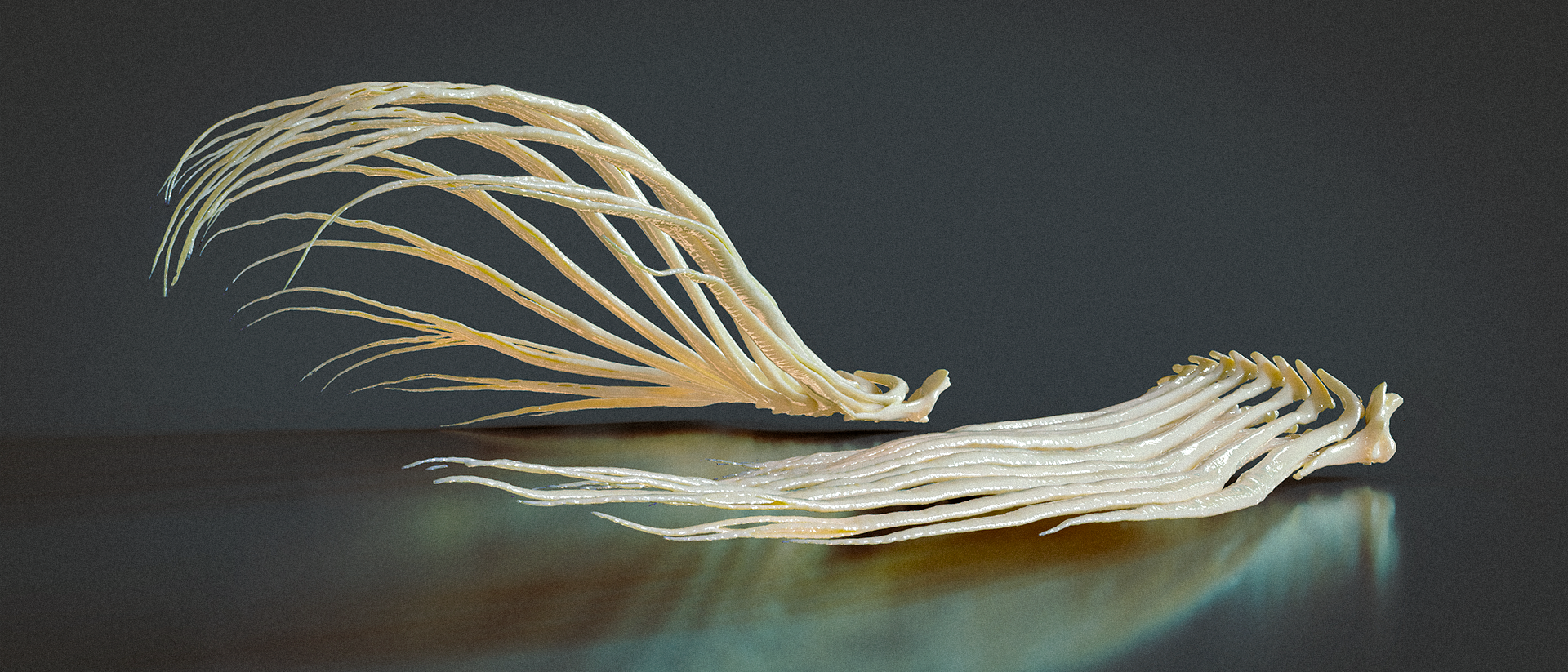
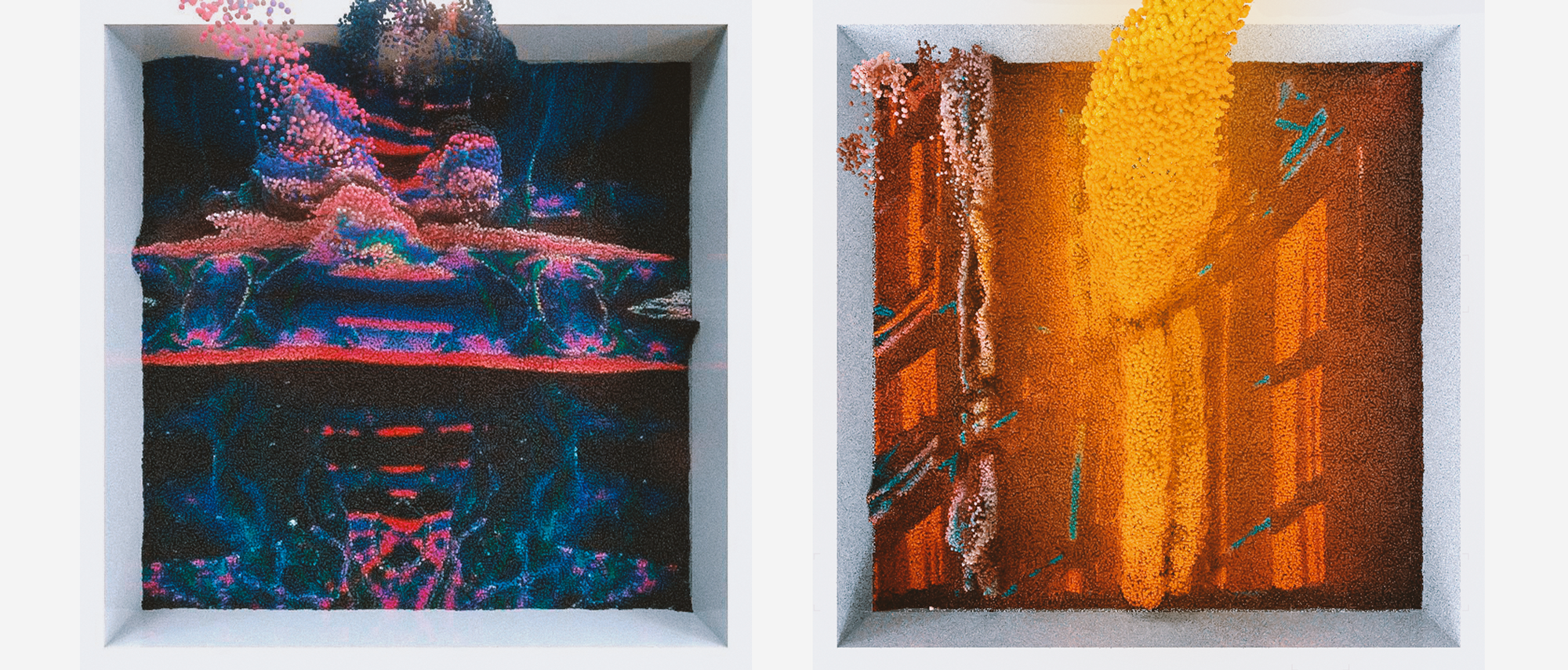
A render of two CT-scanned fish fin skeletons with and without loads applied to the bottom (ventral) side of their surface. When applying a load to the fin (left) the structure morphs towards the force direction forming a bowl-like shape.
To really understand why fins are able to perform such movements it is necessary to take a look at the bone structure of single fin rays first. In the next picture you can see one ray of the undeformed fish fin and it's characteristic architecture. An individual fin ray branches out several times from base to tip and is composed of two tapered halves. But how can these delicate bones bend in such amplitudes without breaking?

The single fin rays apperently consist of two half-rays, an upper (dorsal) and lower (ventral) half ray.
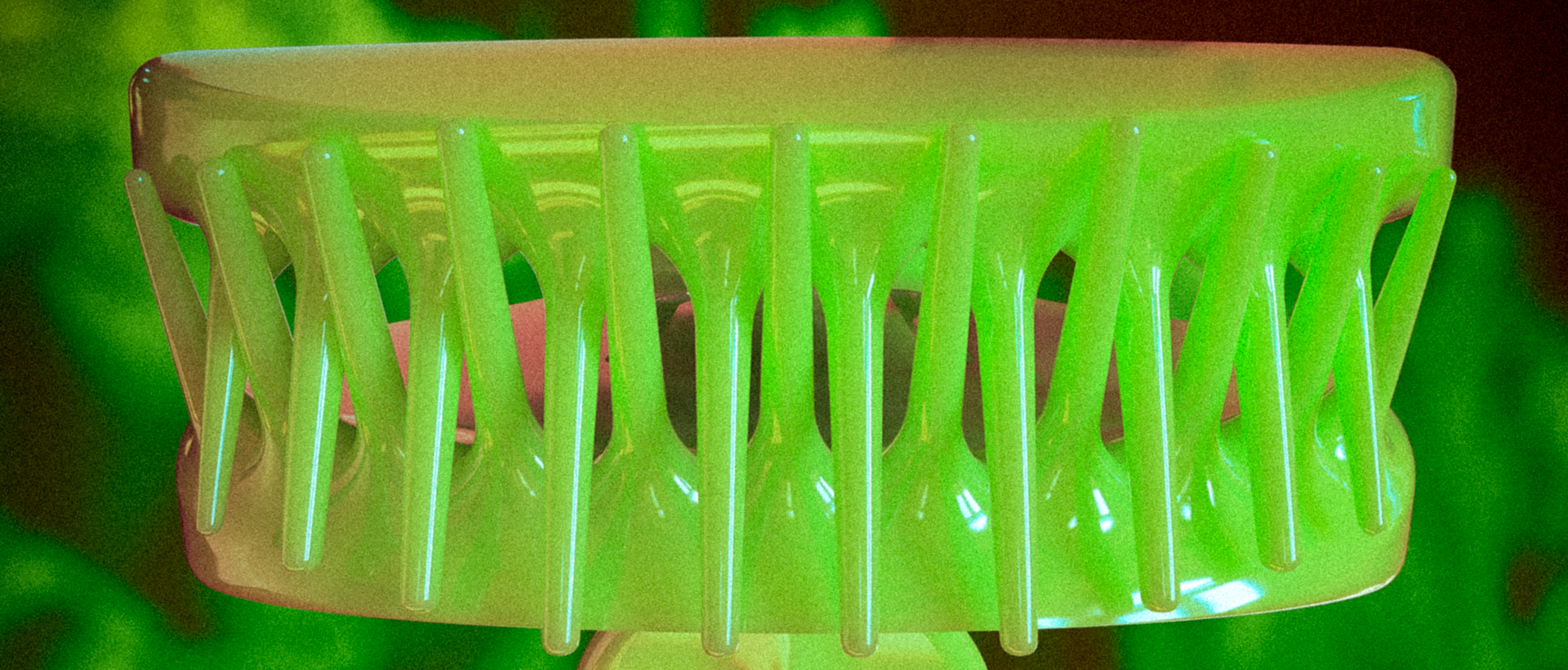
When zooming in further the secret behind the super-flexible half-rays can be revealed. Bones of fish fin rays consist of numerous small, bony segments acting as hinge joints, that make it easy to flex the two bony rows in the ray side to side [3]. Resulting in extraordinary flexibility the fins can morph using only minimal amounts of force [3].

This 3D model with a voxel size of only 2 μm (You see the tiny dots on the right? That's voxels...) is the result from scanning with a μCT-tube. The model reveals the segmented bone structure of fin rays. The bone part in this picture measures only about 5 millimeters in total.
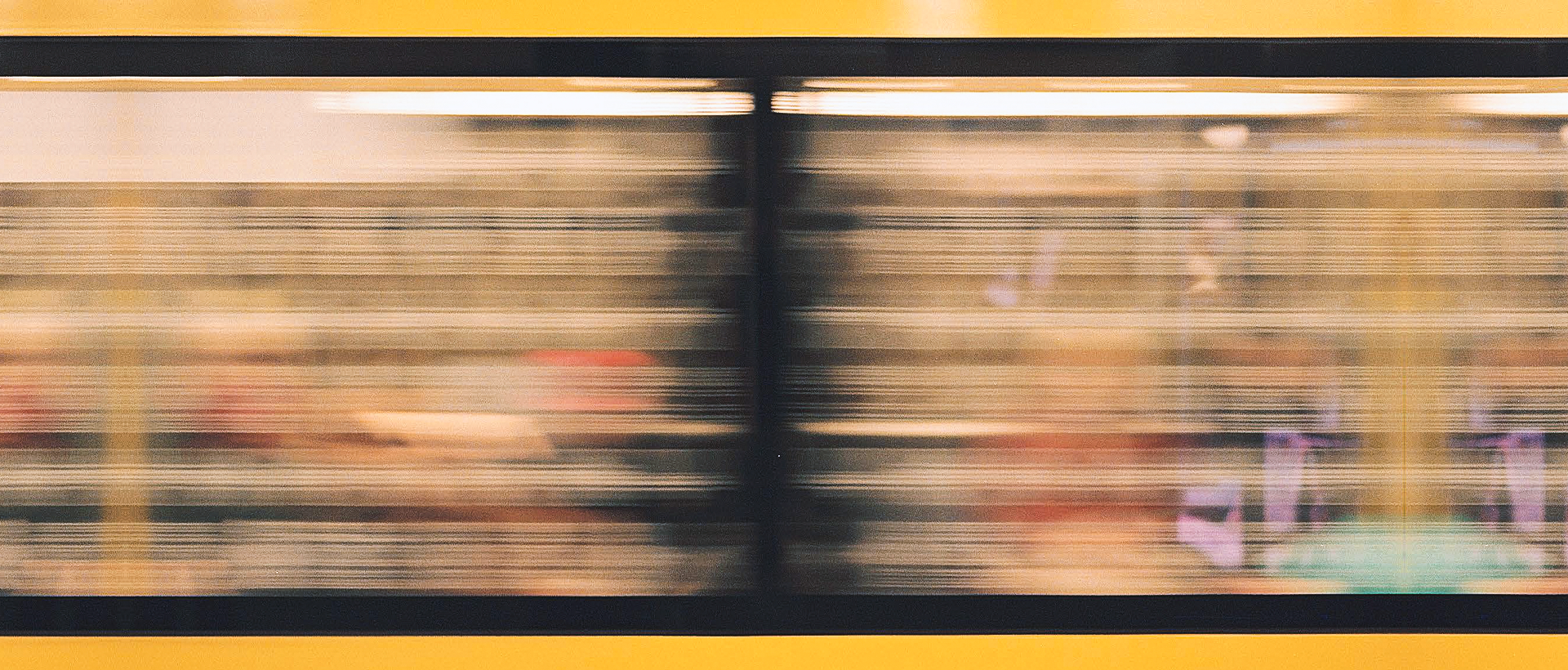
But one key element in solving the mystery of passive morphing fins is still missing. A core consisting of a collagen fibers links not only the bone segments with each other but also the half-rays together [4]. It can be observed best when looking at the raw x-ray data. The mid-grey spaghetti-ish matrix that spans between the two bone rows transforms a push force on one side into a pull force on the other side morphing the rays towards the direction of force.
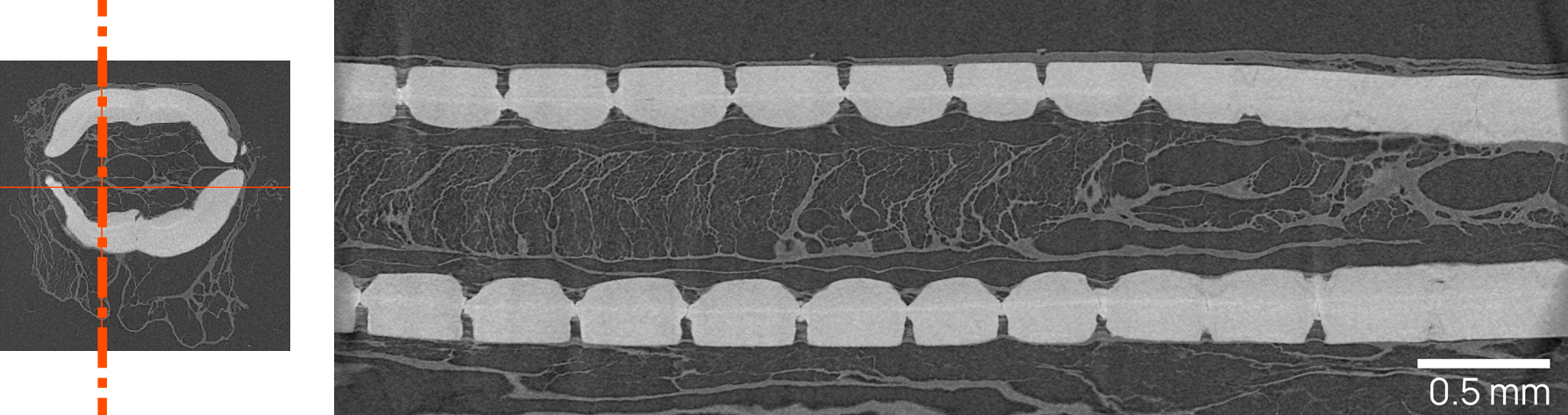
A raw x-ray image (right) of the bone cross-section reveals the interconnecting collagen matrix. For orientational purposes you can see the location of the exact picture slice on the left. The mid-grey areas resemble collagen fibers.
In my thesis I've been investigating even further by remodeling and simulating the array-like fin ray formations. You can dive deeper into 3D fin ray bending by checking out the full version of my thesis below. Here is a small teaser: A 3D-model of the pectoral fish fin bone structure in loaded condition.
:-)
Sources:
[1] Search FishBase, [Online; accessed 7. Apr. 2022], Oct. 2020. [Online]. Available: https://www.fishbase.in/search.php.
[2] G. V. Lauder and P. G. Madden, “Fish locomotion: kinematics and hydrodynamics of flexible foil-like fins,” Exp. Fluids, vol. 43, no. 5, pp. 641–653, Nov. 2007, issn: 1432-1114. doi: 10.1007/s00348-007-0357-4.
[3] F. Hannard, M. Mirkhalaf, A. Ameri, and F. Barthelat, “Segmentations in fins enable large morphing amplitudes combined with high flexural stiffness for fish-inspired robotic materials,” Sci. Rob., vol. 6, no. 57, Aug. 2021, issn: 2470-9476. doi: 10.1126/scirobotics.abf9710.
[4] G. V. Lauder, “How fishes swim: Flexible fin thrusters as an EAP platform,” Proc. SPIE Int. Soc. Opt. Eng., vol. 6524, Apr. 2007, issn: 0277-786X. doi: 10.1117/12.714512.
[1] Search FishBase, [Online; accessed 7. Apr. 2022], Oct. 2020. [Online]. Available: https://www.fishbase.in/search.php.
[2] G. V. Lauder and P. G. Madden, “Fish locomotion: kinematics and hydrodynamics of flexible foil-like fins,” Exp. Fluids, vol. 43, no. 5, pp. 641–653, Nov. 2007, issn: 1432-1114. doi: 10.1007/s00348-007-0357-4.
[3] F. Hannard, M. Mirkhalaf, A. Ameri, and F. Barthelat, “Segmentations in fins enable large morphing amplitudes combined with high flexural stiffness for fish-inspired robotic materials,” Sci. Rob., vol. 6, no. 57, Aug. 2021, issn: 2470-9476. doi: 10.1126/scirobotics.abf9710.
[4] G. V. Lauder, “How fishes swim: Flexible fin thrusters as an EAP platform,” Proc. SPIE Int. Soc. Opt. Eng., vol. 6524, Apr. 2007, issn: 0277-786X. doi: 10.1117/12.714512.