And this is it: fjellgeit. The catchy Norwegian word for mountain goat. The motors are coupled through a sensomotori loop, making the motors oscillate around a center angle. By phase shifting this oscillation a walking behaviour can be achieved:
Our robot has sand paper attached to one side of the foot. In phase 1 the back foot grips with it's sand paper side and pushes the front foot on it's smooth part. In phase 2 it's exactly vice versa.
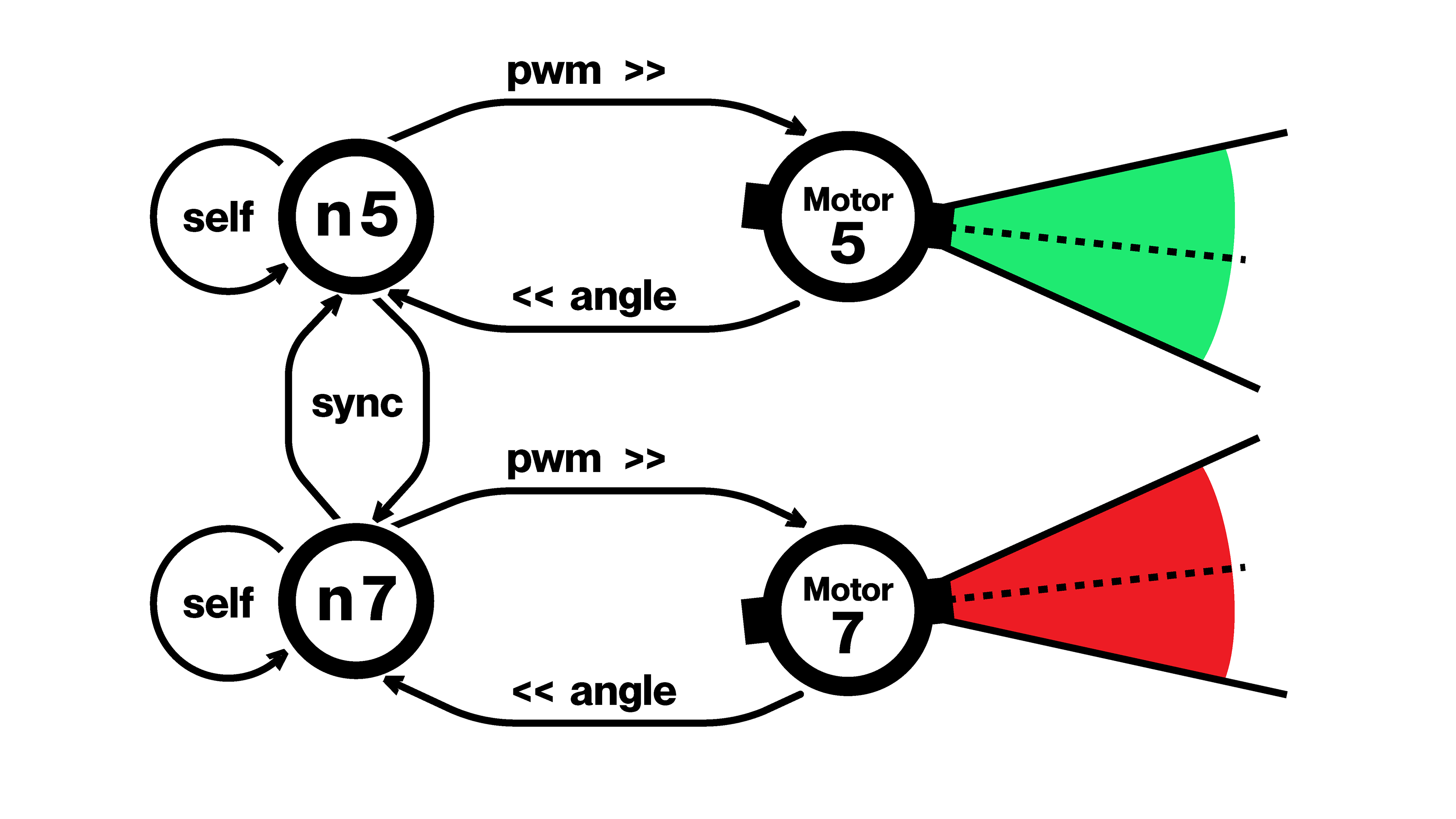
The sensorimotor loop is basically a minimal neural network consisting of only two coupled artificial neurons where each of the neurons has their link to one of the two motors. The neural oscillation is basically controlled by the connection and self weights of the two linked neurons. The motors keep oscillating as part of the same control loop and are balancing themself with the oscillation.
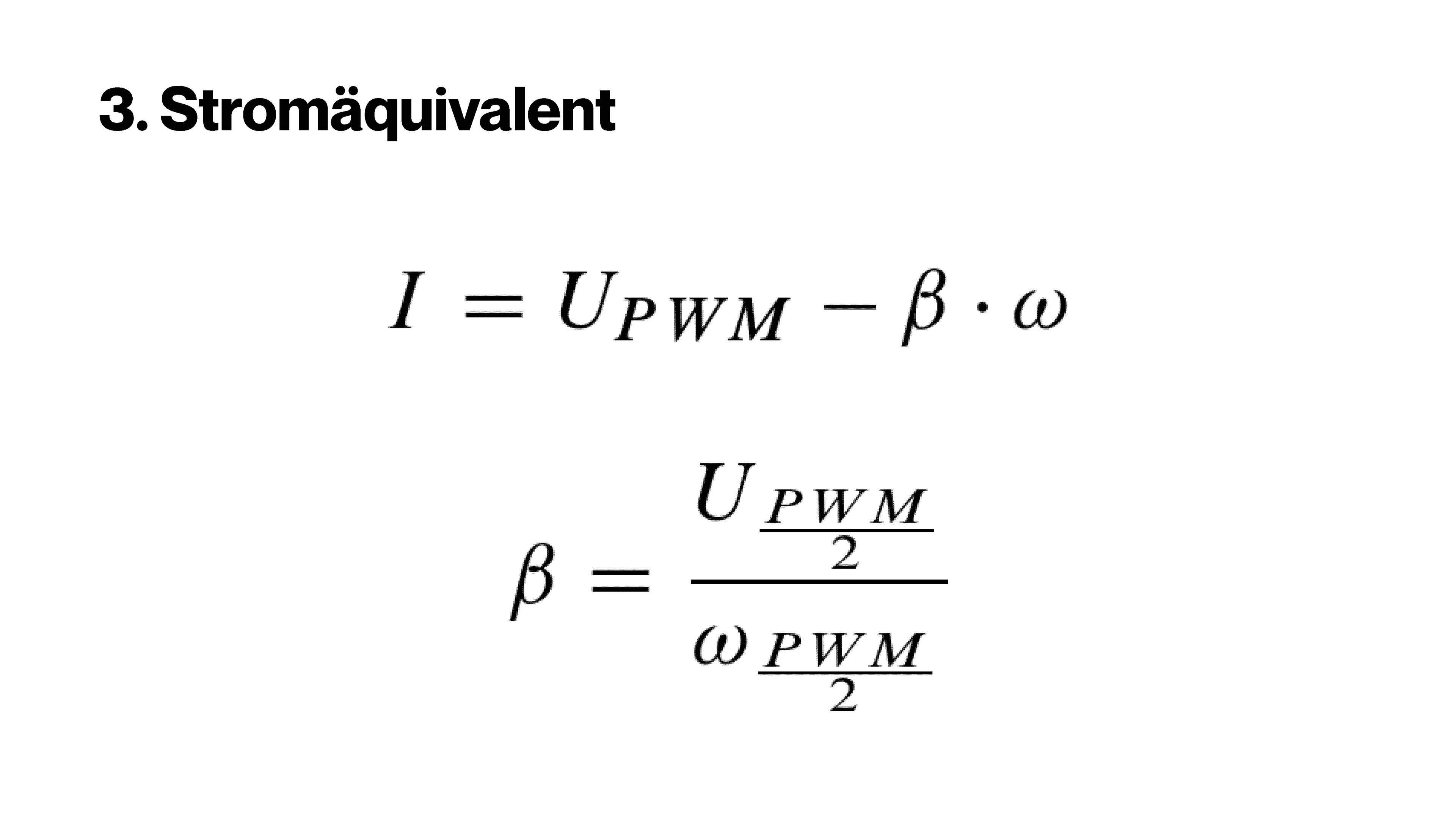
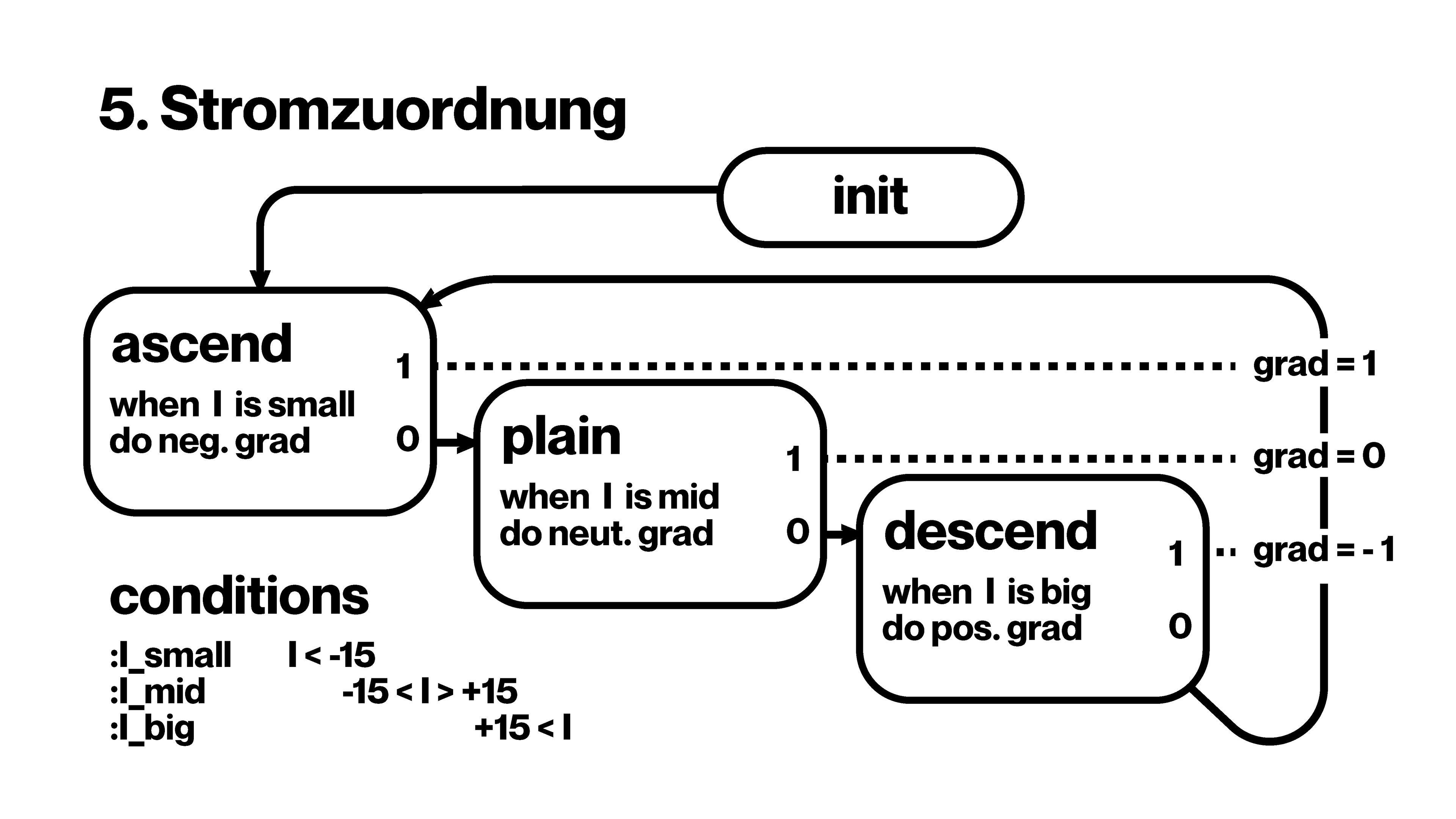
Since we know the voltage being put onto the motor as well as the angular velocity omega the motor outputs, we can determine a current equivalent. This equivalent gives us a rough estimate on how much torque is currently put on the motors. We can understand this way if the robot uses more or less energy on the track.
With the following state machine we can differentiate between three conditions: 1. ascend, 2. plain, 3. descend walking. Since our current equivalent will be in a characteristic range when the robot faces a certain terrain. This way it's possible to kind of make the robot obtain a sense of it's environment without any conventional sensors. The motor itself serves as the sensor.
But see for yourself in the following video how the system performs.
All the information given, as well as the entire project wouldn't have been possible without my unimate Sebastian Feig and our professor Manfred Hild. Hild gaves us a lot of input about sensorimotor loops in our project. So thanks a lot to you both.