The bot we were programming suppose to avoid obstacles while navigating autonomously through a laboratory arena. It is based on the Braitenberg vehicle concept, a thought experiment by the cyberneticist Valentino Braitenberg. In his vehicle book he explains simplified models occuring in the animal world such as simple reactive behaviours.
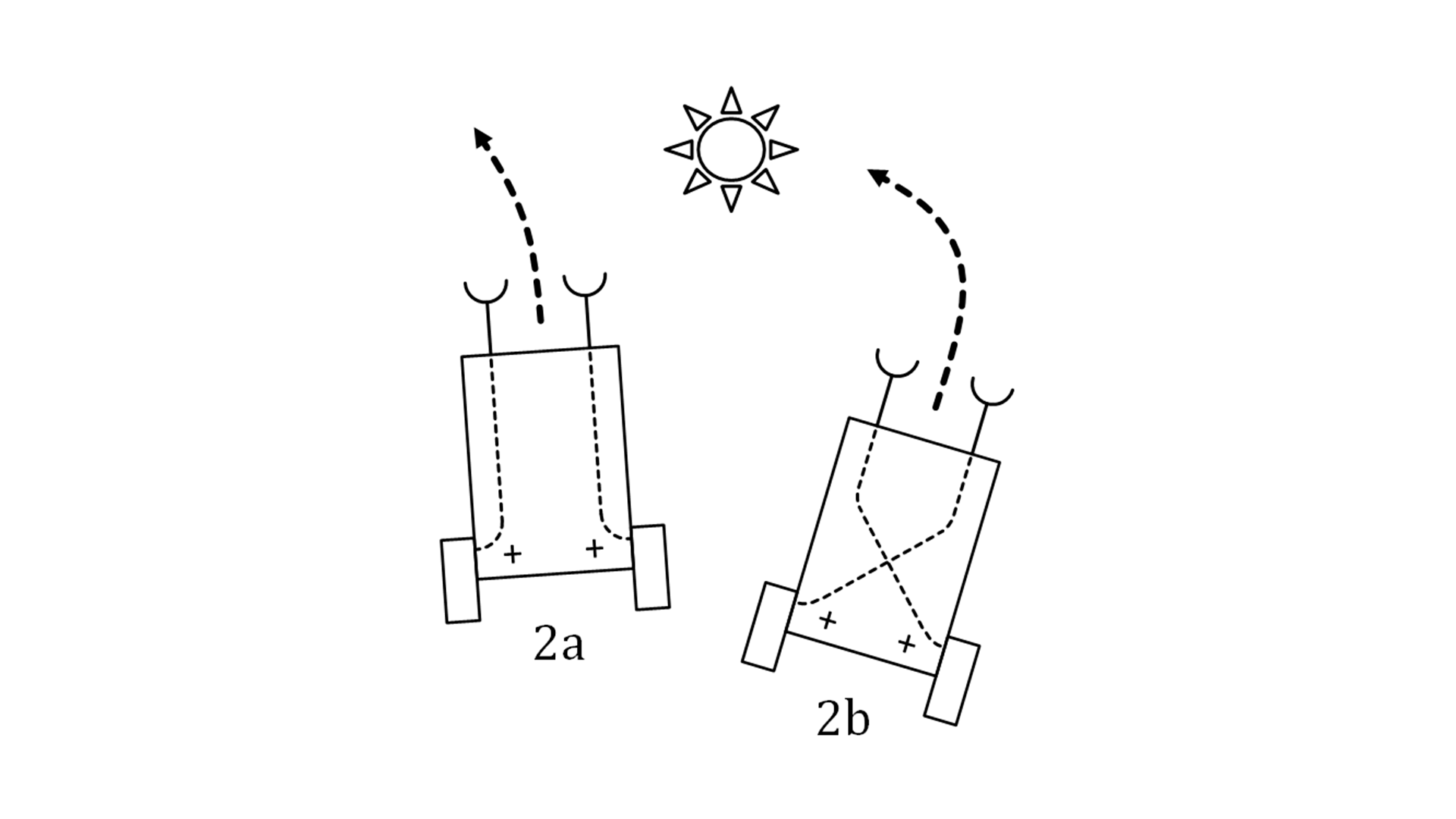
In vehicle No. 2a the output of two individual brightness sensors (left and right) resembles the motor input and steers the vehicle 2a away from the sun. Sensors of vehicle 2b are cross-connected which leads to steering towards the light. (image by Thomas Schoch)
Since our bot has only one infrared-sensor centered in the middle of it's PCB we need to resort to a trick. While the robot is moving forward it is oscillating using it's differential drive. This oscillation results in a left-and-right looking behaviour, creating two virtual sensors. The behaviour as well as a short time memory system can be implemented through a 23-neuron network proposed by our Prof. Manfred Hild.
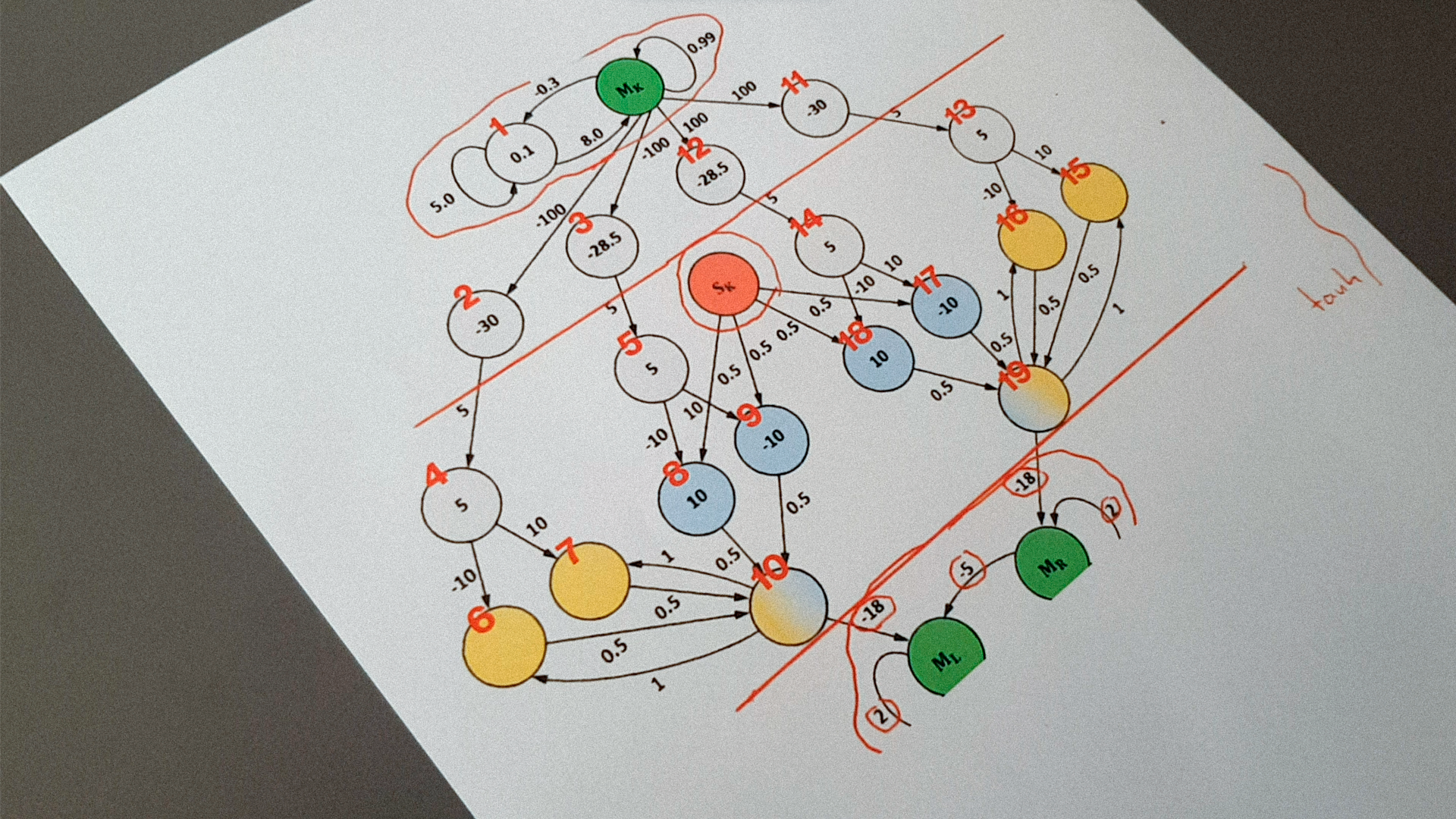
The 23-neural-network that leads to synchronized oscillation and temporary memory of the collected distance values.
In the following video you can see how it works. At the start of the video there will be a short demonstration of the Minibot navigating through the arena followed by further explanations of our system.
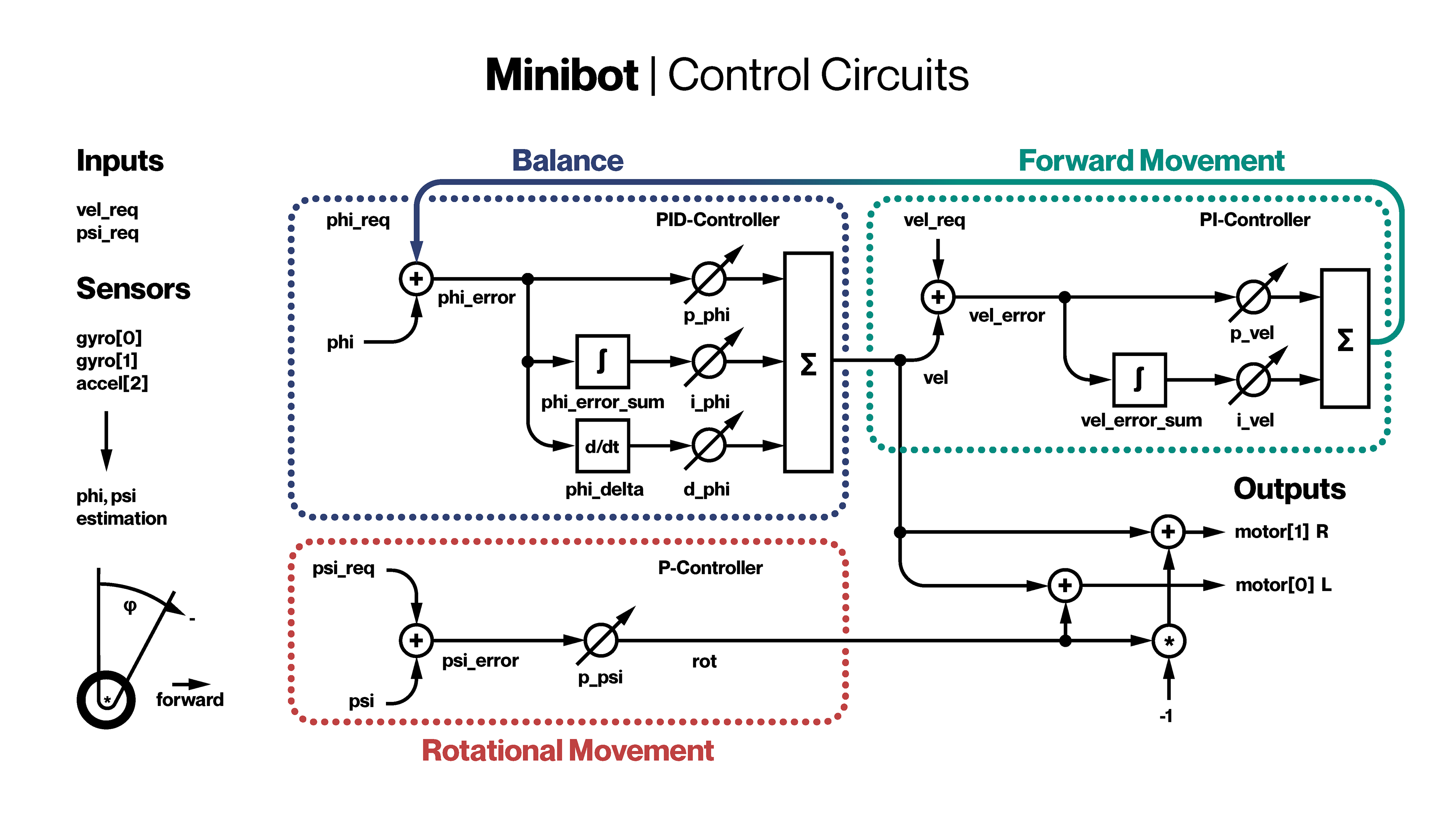
And here are the schematics for the segway controller as principal flow diagrams.