The object of our research was the design of a kinematic fin system that passively deforms when paddeling through the water . This rather soft approach of a paddle promises to displace a body of water better than stiff paddles. Therefore we designed a Manta ray inspired robotic wing as well as a measurement device that records the forces acting on the bioinspired paddle.
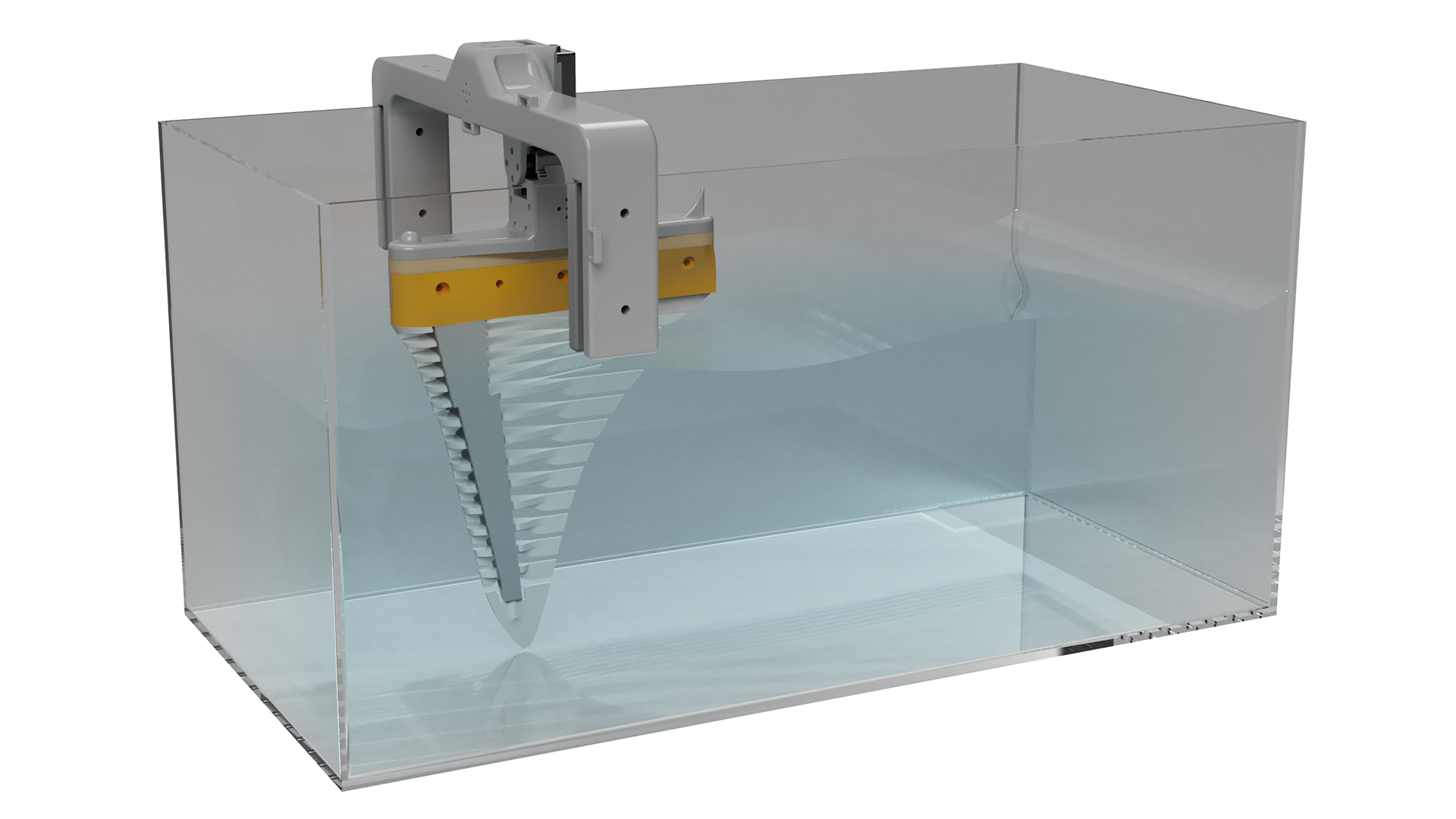
The soft-robotic wing attached to a motor that is mounted on a aquarium through a 3D-printed fixture.
In order to achieve the desired deformation, it was necessary to fundamentally understand the fin ray principle. Through simulations we explored the effects that occur when changing the various constructive parameters of a simple fin ray. After various experiments we came up with a wing design like this:
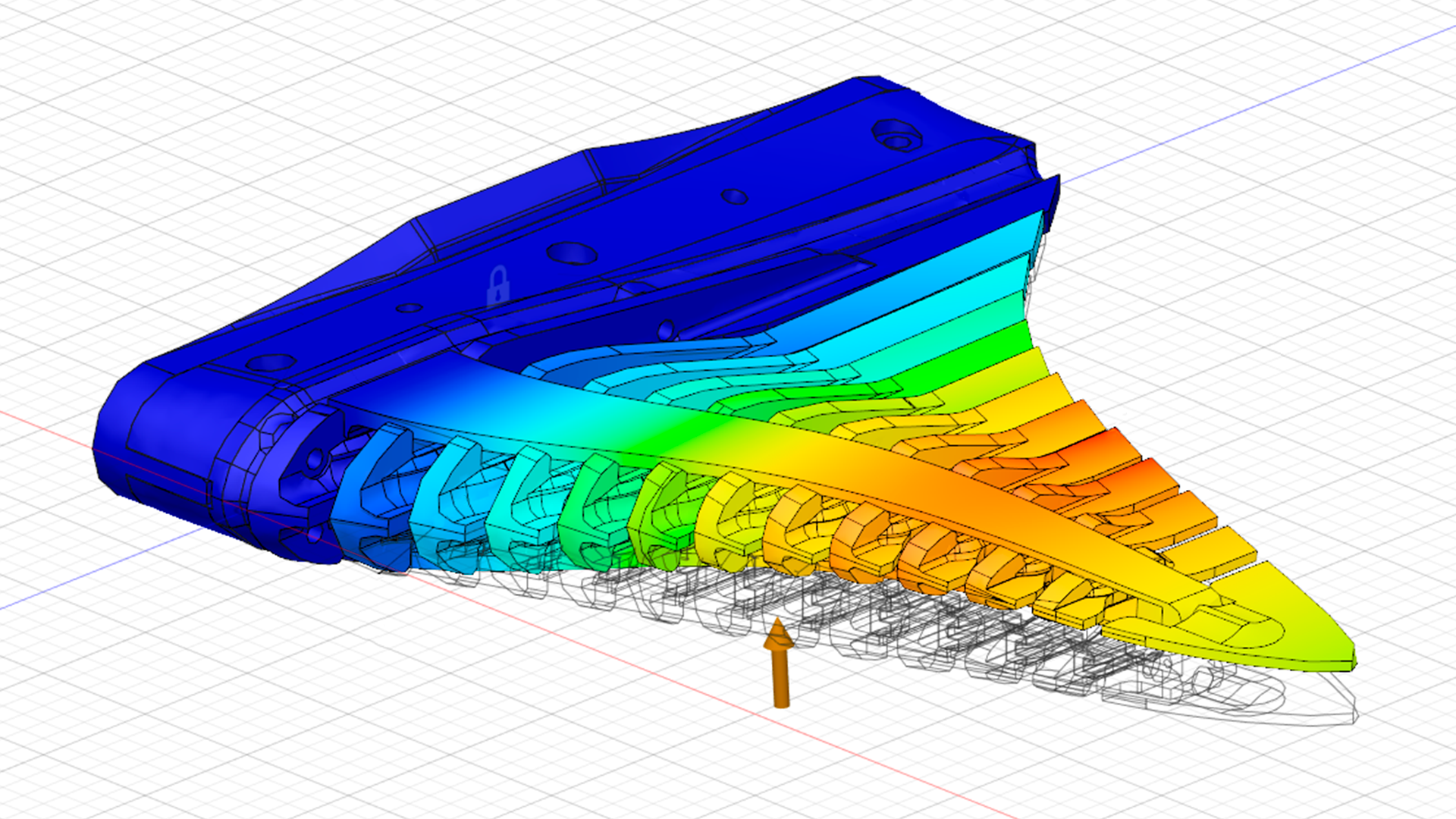
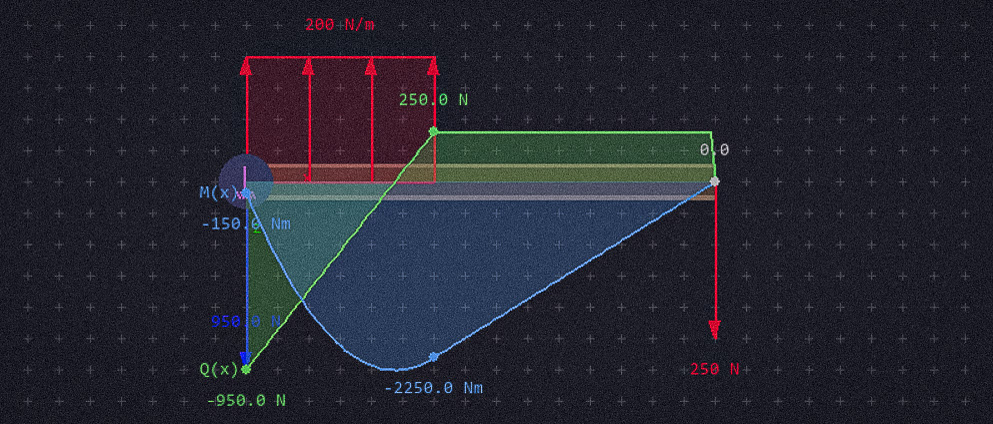
When applying forces from below the wing deforms towards the direction of the applied force through fin ray effect bending.
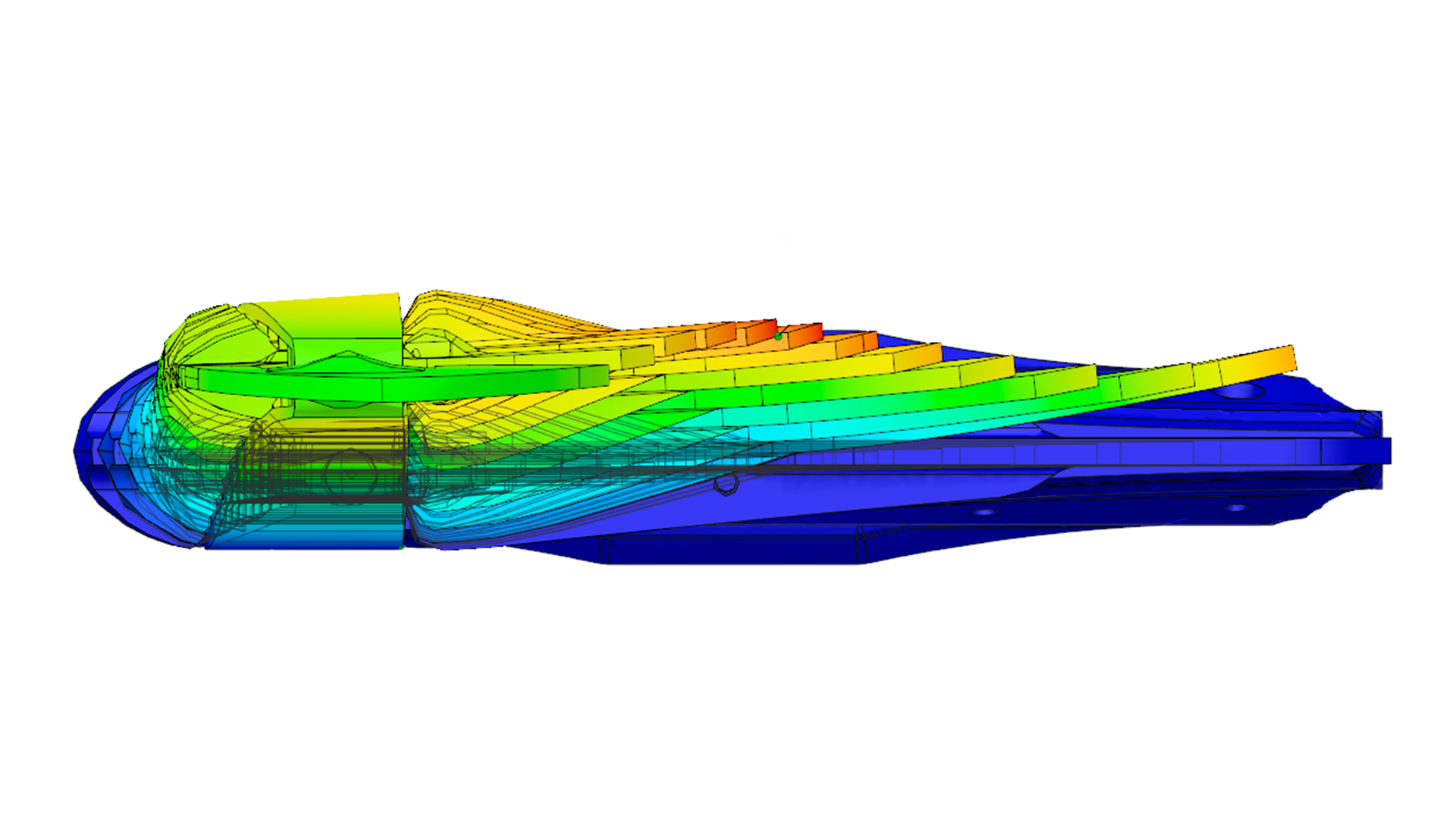
The back of the wing bends elastically upwards such a s a beam would bend with increasing length. This way the water body moves backwards.
It has been quite a long time since I've been telling about the project. If you're interested in more details I can provide you with our project documentation or geometric models. What I know for sure is that the entire project sparked my interest in bioinspired morphology and bionic robots massively. Since then I've been researching and experimenting in this field a lot.